Your shopping cart is empty!
 Robot and Robot Kit
Robot and Robot Kit Robot Controller
Robot Controller Servo Controller
Servo Controller Motor Controller and Driver
Motor Controller and Driver Computer Interface
Computer Interface Sensors
Sensors Arduino
Arduino Arduino Shield and Accessories
Arduino Shield and Accessories RC Interface
RC Interface Display
Display Prototyping
Prototyping Voltage Regulator
Voltage Regulator Miscellaneous
Miscellaneous Ball Casters
Ball Casters Switches
Switches Servo
Servo LEDs
LEDs Headers
Headers")
Orangutan SVP-1284 Robot Controller (assembled)
Product Code: 00060
Availability: Currently Unavailable
Availability: Currently Unavailable
Price: $99.95
Overview
 |
The Orangutan SVP robot controller is a complete control solution for small and medium-sized robots running at 6 – 13.5 V. The module is designed around the powerful Atmel ATmega324PA AVR microcontroller (32 KB flash, 2 KB RAM, and 1 KB EEPROM) or ATmega1284P (128 KB flash, 16 KB RAM, and 4 KB EEPROM) running at 20 MHz and features a full complement of peripheral hardware to support robotics applications: dual motor drivers capable of delivering 2 A continuous (6 peak) per channel, a demultiplexer for easy control of up to eight servos with a single hardware PWM, a removable 16×2 character LCD with backlight, a user trimmer potentiometer, a buzzer for simple sounds and music, three user pushbuttons, and two user LEDs. The board also provides 21 free I/O lines, of which 12 can be used as analog inputs, and two switching buck (step-down) voltage regulators—one for the 5V bus and one adjustable from 2.5 V to 85% of VIN—each capable of supplying 3 A, which means there’s plenty of room and power for adding sensors, servos, and other peripherals.
 |
In addition to the user-programmable ATmega324 or ATmega1284 microcontroller, the Orangutan SVP features an auxiliary PIC18F14K50 MCU that supports the main processor and serves as an integrated AVR ISP programmer, which means that no external programmer is required to use the Orangutan SVP. This auxiliary processor provides a USB connection that allows direct communication with a PC, and its firmware lets it perform several useful tasks in parallel with the main microcontroller. For example, the auxiliary processor can read two quadrature encoders, such as encoders for Pololu wheel 42×19mm or our 37D mm metal gearmotors with encoders, without burdening the main MCU, or those same four inputs could be used as additional analog inputs. The user AVR can read data from the auxiliary MCU over SPI. A USB A to mini-B cable is included with the Orangutan SVP.
The Orangutan SVP is compatible with freely available development software for Atmel’s AVR microcontrollers, including Atmel Studio and the WinAVR GCC C/C++ compiler. We provide an extensive set of software libraries that make it easy to interface with all of the integrated hardware, including the auxiliary microcontroller. Using these libraries, it takes just a few simple lines of code to write to the LCD, read button presses, drive motors, and control servos. These libraries come with a number of sample programs that demonstrate how to use the various components on the Orangutan SVP.
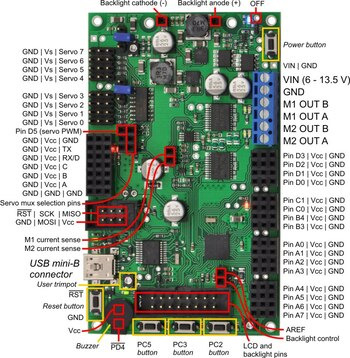 |
| Orangutan SVP fully assembled PCB with pins labeled. |
|---|
Main Features
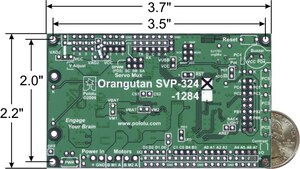
- Overall unit dimensions: 3.70" × 2.20"
- Input voltage: 6 – 13.5 V
- Programmable 20 MHz Atmel ATmega324PA AVR microcontroller with 32 KB flash, 2 KB SRAM, and 1 KB EEPROM (SVP-324 version)
- Programmable 20 MHz Atmel ATmega1284P AVR microcontroller with 128 KB flash, 16 KB RAM, and 4 KB EEPROM (SVP-1284 version)
- Built-in USB AVR ISP programmer (USB A to mini-B cable included)
- 2 bidirectional motor ports (2 A continuous per channel, 6 A maximum per channel)
- 8-output demultiplexer tied to one of the user AVR’s hardware PWMs for easy control of up to 8 servos
- 21 free I/O lines
- 17 free I/O lines on the main AVR MCU, of which 8 can be analog inputs
- 4 input lines on the auxiliary processor, which can be either 4 analog inputs or dual quadrature encoder inputs
- 2 hardware UARTs
- Removable 16-character × 2-line LCD with backlight
- Primary 5V switching regulator capable of supplying 3 A
- Secondary adjustable (2.5 V – 85% of VIN) buck (step-down) voltage regulator capable of supplying 3 A
- Buzzer tied to one of the user AVR’s hardware PWMs
- 3 user pushbutton switches
- 2 user LEDs
- Power (push-on/push-off) and reset pushbutton switches
- Power circuit makes it easy to add extra power buttons and provides a self-shutdown option
- Auxiliary processor (connected via SPI) provides:
- Battery voltage reading
- User trimmer potentiometer reading
- Integrated USB connection
- In-System-Programming of the main processor
- Ability to read two quadrature encoders
- Comprehensive user’s guide
Note: The Orangutan SVP is also available as an SVP-324 partial kit or SVP-1284 partial kit that has all of the surface-mount parts pre-soldered and a variety of through-hole parts included separately. The kit versions give you more flexibility to customize your Orangutan SVP for your particular application.
Dimensions
| Size: | 3.70" x 2.20" |
|---|---|
| Weight: | 2.7 oz |
General specifications
| Processor: | ATmega1284P @ 20 MHz with auxiliary PIC |
|---|---|
| RAM size: | 16384 bytes |
| Program memory size: | 128 Kbytes |
| Motor driver: | Dual TB6612FNGs |
| Motor channels: | 2 |
| User I/O lines: | 211 |
| Max current on a single I/O: | 40 mA |
| Minimum operating voltage: | 6 V |
| Maximum operating voltage: | 13.5 V |
| Continuous output current per channel: | 2 A |
| Peak output current per channel: | 6 A |
| Current sense: | 0.85 V/A |
| Maximum PWM frequency: | 80 kHz |
| Reverse voltage protection?: | Y |
| External programmer required?: | N |
| LCD included?: | Y |
Notes:
- 1
- 17 on the AVR, of which 8 can be analog inputs. 4
-
Documentation and other information
 Pololu Orangutan SVP User’s Guide (Printable PDF: orangutan_svp.pdf)
Pololu Orangutan SVP User’s Guide (Printable PDF: orangutan_svp.pdf)
User’s guide for the Pololu Orangutan SVP-324 and SVP-1284 robot controllers (both assembled and partial-kit versions).
 Pololu AVR Programming Quick Start Guide (Printable PDF: avr_programming_quick_start_guide.pdf)
Pololu AVR Programming Quick Start Guide (Printable PDF: avr_programming_quick_start_guide.pdf)
This guide explains how to get started programming your Orangutan or 3pi Robot in Windows, Linux or Mac OS X. It covers setting up an AVR development environment (Atmel Studio 6 for Windows users), installing the Pololu AVR C/C++ Library, and setting up the Pololu USB AVR Programmer.
 Pololu AVR C/C++ Library User’s Guide (Printable PDF: pololu_avr_library.pdf)
Pololu AVR C/C++ Library User’s Guide (Printable PDF: pololu_avr_library.pdf)
Information about installing and using the C/C++ libraries provided for use with Pololu products.
 Pololu AVR Library Command Reference (Printable PDF: avr_library_commands.pdf)
Pololu AVR Library Command Reference (Printable PDF: avr_library_commands.pdf)
A reference to commands provided in the Pololu C/C++ and Arduino libraries for the AVR.
Programming Orangutans and the 3pi Robot from AVR Studio 4Guide for programming Orangutans and the 3pi robot from the Atmel’s older AVR Studio 4 IDE. It covers installing the Pololu AVR C/C++ Library, and setting up the Pololu USB AVR Programmer.
File downloads
- Pololu AVR Development Bundle for Windows (release 140513) (12MB exe)
- This bundle contains all the Pololu software you need to get started programming AVRs in Windows: the Pololu AVR C/C++ Library, the Pololu USB AVR Programmer drivers and software, and the Pololu Orangutan SVP drivers. We recommend installing Atmel Studio 6.1 before installing this bundle.
- Orangutan SVP Drivers for Windows (version 121115) (53k exe)
- This executable installer contains the drivers you need to use the Orangutan SVP in Windows.
- Orangutan SVP Reference Diagram (82k pdf)
- This printable quick-reference diagram identifies all the interactive components on the Orangutan SVP, including the pins, pots, LEDs, and pushbuttons.
- Orangutan SVP Schematic Diagram (99k pdf)
- Sample AVR Studio 4 project for the ATmega324PA to blink an LED (7k zip)
- This is a sample AVR Studio 4 project that will blink an LED on an Orangutan SVP-324.
- Sample AVR Studio 4 project for the ATmega1284P to blink an LED (8k zip)
- This is a sample AVR Studio 4 project that will blink an LED on an Orangutan SVP-1284.
- Toshiba TB6612FNG motor driver datasheet (308k pdf)
- Orangutan SVP guia de usuario (2MB pdf)
- A Spanish version of the Orangutan SVP robot controller user’s guide, provided by customer Jaume B.
- Orangutan SVP desktop background, 1280×768 (438k jpg)
- Orangutan SVP desktop background, 1280×768, no LCD (521k jpg)
- LSM303DLM Orangutan example project (5k zip)
- This sample program shows how to use an LSM303DLM 3D compass and accelerometer carrier with an Orangutan robot controllerto build a tilt-compensated digital compass. The AVR Studio project is set up for an ATmega328P microcontroller, but it will work on other Orangutans with simple changes to the project configuration.
Recommended links
- WinAVR
- A free, open-source suite of development tools for the AVR family of microcontrollers, including the GNU GCC compiler for C/C++.
- AVR Studio 4
- The older version of Atmel’s free integrated development environment (IDE) for AVRs, which is no longer supported by Atmel.
- ATmega324PA documentation
- Atmel’s product page for the ATmega324PA.
- ATmega1284P documentation
- Atmel’s product page for the ATmega1284P.
- AVR Libc Home Page
- The web site for AVR Libc, which is the standard library of functions that you can use with C and C++ on the AVR.
- GCC, the GNU Compiler Collection
- Documentation for GCC, including the AVR GCC C/C++ compilers.
- Pololu A-Star and Orangutan Forum Section
- The A-Star and Orangutan discussion section of the Pololu Robotics Forum.
- AVR Freaks
- AVR community with forums, projects, and AVR news.
- Orangutan SVP on RoboRealm
-
RoboRealm provides an AVR program that can be installed on the Orangutan SVP, which makes many features of the Orangutan SVP available through RoboRealm’s graphical user interface.

{kind=link}
{kind=link}
Powered By OpenCart
RobotSimple © 2025
RobotSimple © 2025